--- In
DynoMotion@yahoogroups.com, Andrew Ford <ahford@...> wrote:
>
> Hey guys,
>
> I've been having a lot of trouble trying to get my servos tuned and
> generating a lot of hand-numbing/table-ratting oscillations instead. Part
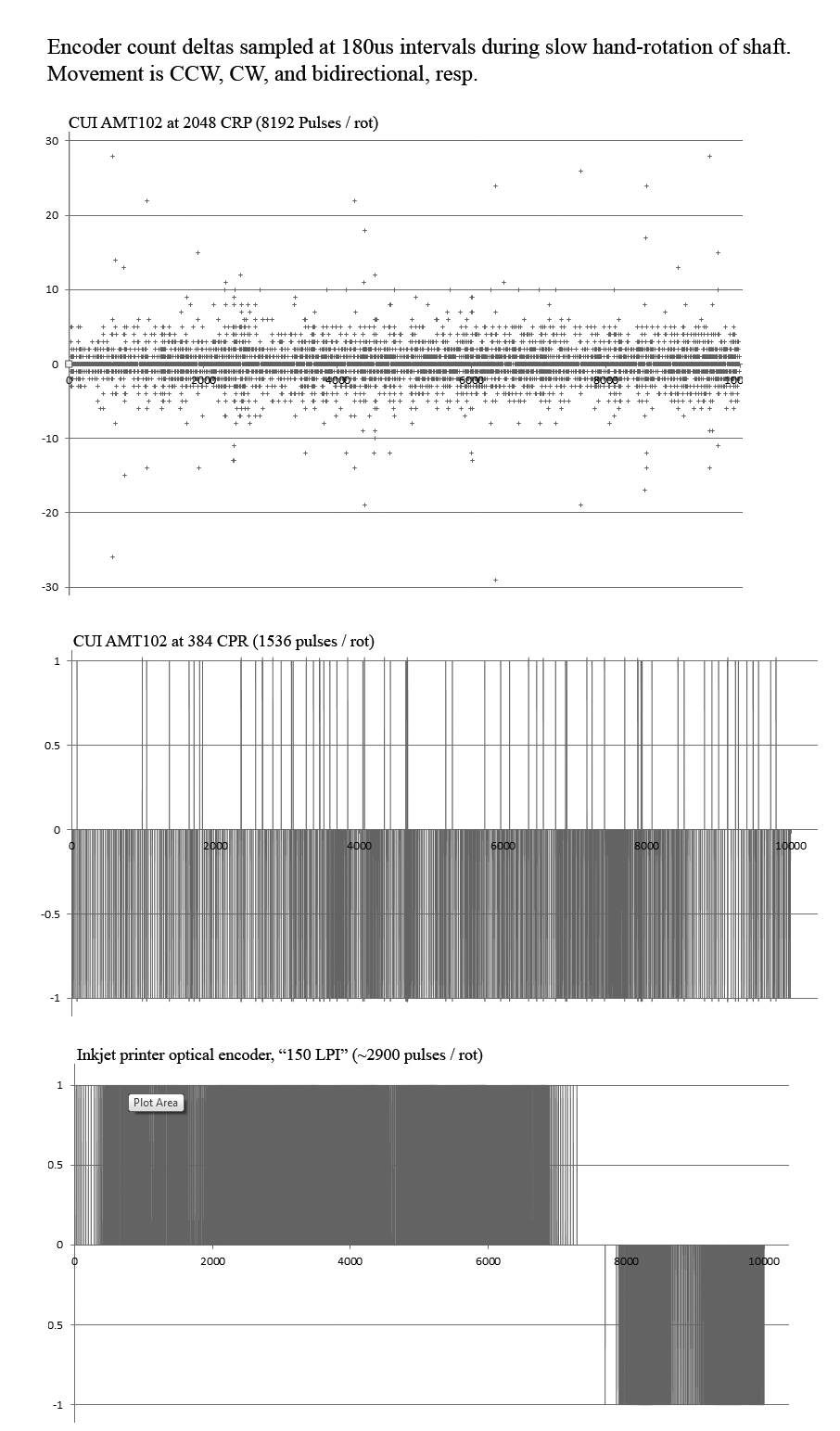
> of the problem is the accuracy of the CUI AMT-102 encoders I've been using.
>
> I did a data capture (super awesome feature of using something programmable
> like KFLOP), and I'm attaching the results. I've got captures from the CUI
> encoder at 2048 CPR, 384CPR, and a capture of an optical encoder I
> liberated from a printer which is approx 725CPR
>
> 2048 CPR mode is just about useless, the counts are all over the place
> during motion (it's stable when motionless).
>
> 384 CPR still shows some noise, which in the data is a series of backtracks
> of 1 count during rotation. I didn't try to analyze the raw data for rate
> of count changes, but there's almost certainly timing jitter there if it
> can backtrack a count. I think the 192 CPR mode might still be useful for
> spindle rotation, and perhaps the 200 CPR mode is useful for steppers, I
> didn't test.
>
> The optical encoder is solid and the data looks about as smooth as my hand
> rotation.
>
> Looks like I'm getting some new optical encoders.
>
{kind=link}